协作机器人获得排序和测量能力
包括精密机器人卡尺的新工具可延长了协作机器人的适用性进行分类和测量小部件。
#techbrief.
.jpg;width=70;height=70;mode=crop)
编辑洛瑞贝克曼
分享
用于合作机器人(COBOTS)的ARM端工具的创新,包括引入小型,精确和轻质的机器人卡尺,现在正在带来cobots的好处进入质量控制实验室。Q-Span系统从新的大规模机器人自动化的小部件测量,从这个繁琐的手工任务,同时提高重复性和可靠性的人力操作。
最近的三项创新使分类和测量自动化成为可能:


1.精密机械卡尺。
2.较小,较轻的重量夹具。
3.一个系统,使多个卡钳和夹持器能够安装在单个Cobot上并由一个程序控制。
新的规模机器人带来了这三种创新,并将它们与ur3e cobot一起配对通用机器人要为自动化,小部分QC测量创建专用Q扫描系统。该设备可以自动选择零件,测量每个维度,并根据结果进行实时决策。然后,它可以将部件分配到输出托盘中,并将所有测量数据发送到计算机以供以后分析。
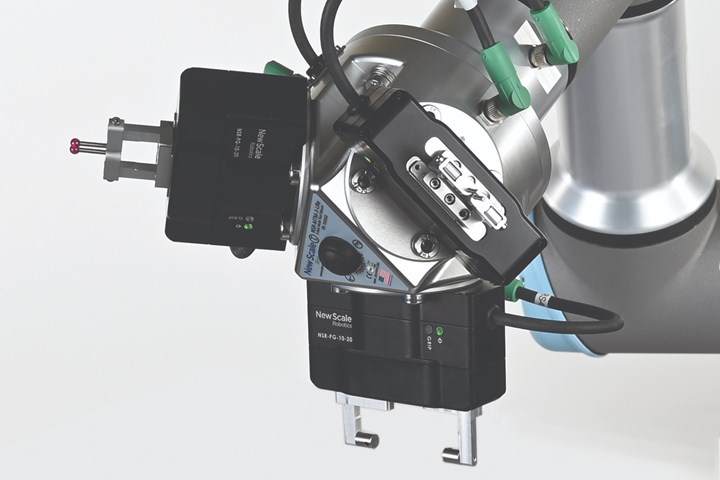
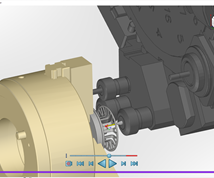
精密的机器人卡钳也可以作为小型、轻量级的抓手。在这里,三个机器人被安装在一个合作机器人手臂上,使用一个支架和软件来控制采摘、测量、数据记录和放置。(图片来源:新规模机器人。)
典型的Q跨度系统具有一个机器人夹具,用于部件处理和一个或两个机器人卡尺,以进行测量。在许多情况下,一个工具用作夹具和卡尺。每台卡钳都配备了特定于部件的计量手指和待测量的尺寸。可以测量的尺寸包括长度,宽度,厚度,外径(OD)和内径(ID)。
因为它们很小而轻巧,其中三个设备可以安装在通用机器人的最小Cobot上。这使系统能够占据最小的实验室空间,并执行更少的大移动的多个进程。
据New Scale Robotics公司介绍,这种夹钳/卡钳取代了手动数字卡钳,其精度大约是手动卡钳的两倍。当使用适当的钳口和建立的计量方法时,零件测量分辨率为0.0001英寸(2.5微米)。+/- 3西格玛重复性和精度分别小于+/- 0.0002英寸(5微米)和+/- 0.0006英寸(15微米)。
一旦Q跨度系统被教导了正确的力,位置和方向所需的精确测量,它可以无限期地重复该程序并继续运行熄灯。可以在许多不同部件的过程中教授程序,并且可以在不到一小时内完成从一个部分转换。
根据该公司的说法,基于劳动力节省,具有通用机器人安装的Q跨度系统的投资平均投资不到11个月。
三坐标测量机的机器人看护
现在,协作机器人还可以使用Q-Span系统来自动装卸坐标测量机(CMM)。该设备可以配置一个机器人卡尺工具,既剔出又测量

Q跨度系统在COBOT上有一个夹持器/卡钳,可以“智能”机器趋于CMM。夹具/卡钳在将它们放入机器之前进行零件初步测量。
部分。卡尺测量用于增加吞吐量和三坐标测量机的使用。如果初步直径测量在范围内,Q-Span系统将零件加载到三坐标测量机中。如果超出范围,系统可以将零件直接放入“失效”输出托盘,避免浪费三坐标测量机周期。
当零件被加载到三坐标测量机上后,它使用Q-Span系统的测量来决定执行哪个例行检查。它运行其完整的程序,并将其数据发送回Q-Span系统,该系统卸载部件并将其放入适当的输出托盘(通过/失败)。
New Scale Robotics还提供了可扩展的Q-Scan工作站,包括具有更高精度的测量仪器和工具。这些工作站可以结合其他数字输出的压力表,测量各种零件特征,包括高度,深度,外径和内径。线性可变差动变压器(LVDT)高度计、激光高度计、2D激光扫描仪、气压计和机械卡簧计都是可以包含在工作站的其他数字输出仪器的例子。
相关内容
探讨精镗扩孔的效益
铰孔如何与单点无聊相比?铰孔工具的供应商将常用于钻孔的这些过程比较,并为考虑铰孔的人提供提示。
无毛刺微螺纹旋转
线程通常是加工组件时的最后一次操作,这就是该过程需要可靠和高精度的原因。直流瑞士开发了一个内螺纹旋转器,即使在苛刻的难以磨损的难以磨损的情况下,留下了微型线。
如何收集和使用机器数据
制造商无需限制他们收集的机器监控数据,但他们确实需要知道如何收集数据以及如何使用它来驱动决策。