机器人和其他自动化设备的物料处理能力在当今的许多商店中发挥着重要的生产力作用。它们的有效性取决于适当的实施。

手臂工具的气动末端可用于2-,3-和4-jaw配置。

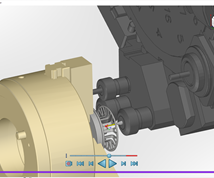
在这个基于进料/出料的系统中,操作员将原始零件放入抽屉,机器人进入抽屉将零件装入机器。通常在抽屉中使用插入件,以实现零件的精确、可重复定位。

输送机提供一种灵活的方法,可以将部件带入自动化单元。
分享
机器人在装卸零件装载和卸载机床和其他制造设备中的材料处理能力广泛的接受和普及。当商店决定潜入并实施这项技术时,它面临着一些重要问题。在这里,我们将研究许多基本细节,例如在寻找此类设备之前购买铰接臂自动化以及了解的内容。
机器人
在装载系统的核心是机器人,以及许多不同的品牌,样式和选择可以考虑。在大多数情况下,本文将处理在机器加载方案中变得如此流行的铰接臂机器人。当商店寻求购买此类设备时,需要确保它可以按预期处理工作,并考虑机器人背后的组织。无机器人是我们汽车行业的一个组成部分的秘密,它提供了高水平所需支持的一个很好的例子。商店应考虑购买后可以提供这种支持的机器人品牌。


不同的机器人被设计用于不同的环境。对于制造公司来说,选择一个工业级机器人是很重要的,它的设计是工作在芯片覆盖,冷却滴液的环境中,这是我们的机床装载世界的正常情况,而不是设计工作在实验室或食品加工厂。
机器人的大小取决于距离和有效载荷。所需机器人的范围可能最好由设计细胞的团队决定。这是电池的大小与输入部件的来源、成品部件的放置位置以及装卸机器的可用权限相结合的函数。
有效载荷是机器人可以接收的重量,但这个数字可以有点误导。除了零件重量本身之外,有效载荷是机器人可以提升的量,包括所有工具,夹持器,适配板,延伸部等,安装在机器人上的机器人上的抓握部件。另外,该重量从机器人前部的特定点陈述。远离这一点的重量位于,机器人可以处理的重量越少。对于良好的拇指规则,对于大多数标准负载/卸载应用程序,只有大约一半的有效载荷应归因于零件。对于更明确的检查,大多数机器人公司都有有效载荷检查软件,以确保有效载荷在机器人的规范中。
臂端工装
ARM工具(eoat)的末端是安装在机器人末端的工具,以帮助执行必要的任务,例如零件运动。虽然各种工具,如真空杯和磁铁,可用于采摘零件,但车间最常见的风格采用气动夹具。与机器人本身一样,适合工作环境的优质夹具是重要的。
应用程序将决定所需的钳口和夹爪的大小和数量。钳爪有许多配置,可能有两个、三个或四个爪。双爪,平行关闭的夹具是任何方形,矩形或容易夹起两指之间的夹具。三爪夹钳使他们自己来拾起圆形和六角部分,就像三爪卡盘是如此普遍的车床。然而,对于可重复排列的圆形和六角部件,例如由列和列部件组成的托盘,四爪夹具通常更易于管理。
横向进给系统/ 6
馈入/馈出是指将进入的部件送到机器人或单元,并将完成的部件移走的方法。馈入系统将大量零件排队存储,并将这些零件带到机器人可重复使用的地方,以备装载到机器中。出料系统将成品部件从机器人中取出并送到操作员手中,同时也将存储有限数量的成品部件。
建立自动化系统需要许多决策,但最重要的是进给/输出系统。该系统将成为操作员与自动化系统接口最多的点,因此确保它支持所需的内容很重要。例如,在抽屉中的特定方向上具有操作员地位是较低体积的良好解决方案,但是在制造许多相同的部位时将是劳动密集型,特别是如果循环时间很短。进给和输出系统可以是分离的(例如,振动批量进给系统和溜槽)或者可以组合(例如,操作者将进入部件放置的抽屉,并且机器人从而从并将成品零件置于返回)。本文侧边栏中有问题的答案有助于更好地确定哪些设置将最佳。
抽屉通常连接在自动化单元的侧面,并允许操作员与自动化系统的方便接口。抽屉容量有限,因此流行的方法是在堆叠配置中具有几个抽屉,类似于抽屉柜中的堆叠配置。机器人将打开它所需的特定抽屉。完成抽屉后,机器人将把该抽屉推回胸部并拉出下一个抽屉以继续该过程。通常,在抽屉里将有一个插入件,其中一系列口袋和柱子,以允许各个部件的准确和可重复定位,因此机器人将知道该部件所采用的位置。
传送带也提供了一种灵活的(和流行的)方法,将零件带入和退出自动化单元。输送机可以使用可调节的通道引导,将成排的零件带到可重复的位置,供机器人进行拾取,也可以设置成在处理大量零件时将多个零件托盘进出单元的配置。输送机是灵活的,通常在价格上有竞争力,但当需要大量零件时,它们的长度要求可能会在拥挤的商店造成空间问题。
斜槽是一种物美价廉的出料方法。机器人只是将一个零件放在一个倾斜的斜槽上,利用重力把它带到一个盒子里。并不是所有的部件都可以使用滑槽,因为使用这种方法需要考虑部件损坏的问题。
散装振动进料(碗状或类似的)是处理大量零件的一个伟大的方法。几乎不需要操作者的劳动,仅限于简单地将一大桶零件倒入碗中。这些散装馈料器并不以其灵活性而闻名,通常设计用于处理少数类似部件。
工件夹紧
与任何非自动化工作一样,如何为加工操作保持零件是重要的,但是在使用自动化时,机器工作金额现在必须自动。此外,机器人在装载和卸载期间如何将部分保持相同的关注,以便机器工作机制和机器人上的夹具可以一起工作。例如,通常可以缓解或略微修改VIES钳口以容纳握住部件的机器人夹具手指。
大多数车床已经具有液压驱动系统作为标准,但工件和工作控制通常不是铣床标准包的一部分。铣床上的工件选择提供了类似的优点,无论是自动还是不自动;视觉,夹克和扩展仲裁件都是很大的选择,具体取决于零件的要求。较大的考虑涉及如何控制自动处理(液压或气动)。
加入机器更昂贵的液压系统更昂贵,但会产生更多的力量,往往是一个良好的通用工程控制方法。气动系统将允许夹紧力正常调节以适应细腻的部件,但不会产生尽可能多的功率(以及卷起力)作为液压系统。
在哪里买
购买自动化时有几个不同的途径。铰接臂自动化通常由专门与机器人合作的集成商建造。机器人可以以多种不同的方式使用,因此必须在将机器人放在机器上,确保集成商知识是很重要的。将机器人计算机放在一块新的设备上时,一些机床公司拥有自己的集成小组,可以处理整合,以及一些使用外部集成商,他们将指导大部分整合工作。如果要将自动化添加到商店的现有设备中,原始机器供应商可能会提供帮助。如果没有,独立的集成商可以轻松介入处理安装。
无论谁将建立系统,很清楚谁将对谁负责什么。当所有设备购自单个供应商时,显然公司的责任确保所有不同的设备都在一起工作。但是,如果机床由一家公司和机器人从另一家公司提供,则责任线可以很容易地模糊。围绕责任的困难问题需要向所有涉及的供应商处被要求。
有关机器人和自动化的更多信息方法机床股份有限公司,致电978-443-5388或访问方法machine.com。
相关内容
自动化在高混合,低量的车削应用
车削车间熟悉大批量工作的自动化,但向小批量生产的转变带来了新的挑战。
工作的许多方面
这是一种广泛的观察方法来接近工件,从酒吧喂食器到夹头夹在机器人上。
单元制造的优势
制造电池用于最小化制造过程中的产品运动以及材料,设备和劳动力。通过减少循环时间和物料处理,这些细胞帮助商店更容易满足客户对成本,质量和基因时的需求。